Systemreferenz
Handhabungssystem für Robotergehäuse
Systemlösungen | Maschinen- und Anlagenbau | Mobile Robotik
pneumatisch (automatisch)
Serie WWR1000

- Für sehr hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 160 ... TK 200
- Energieelemente zur Übertragung von Medien optional erhältlich
2-Backen-Parallelgreifer
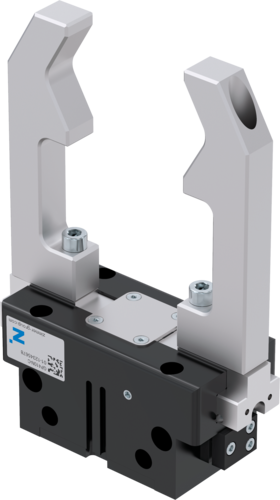
1. pneumatisch (automatisch)
Serie WWR1000

- Für sehr hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 160 ... TK 200
- Energieelemente zur Übertragung von Medien optional erhältlich
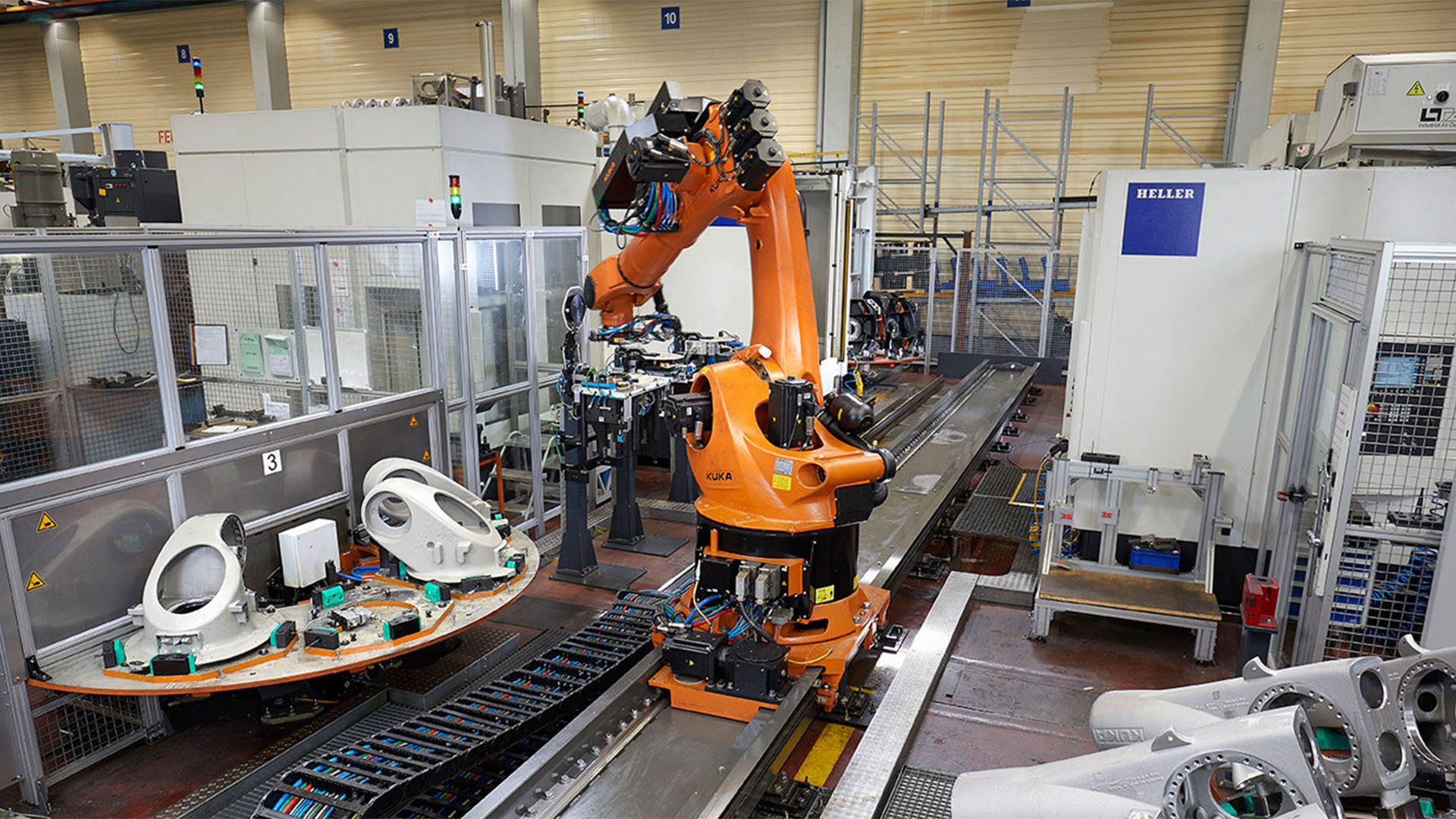
Herausforderung
Drei Bearbeitungszentren sollten mit einem Roboter verkettet werden. Da die Automation nachgerüstet wurde, war der Platzbedarf und somit die Roboterbaugröße limitiert. Ebenfalls sollte auf den Maschinen eine sehr große Teilevielfalt gefahren werden.
Lösung
Aufgrund der Teilevielfalt kam ein automatischer Greiferwechsel zum Einsatz. Die Greifer wurden gewichtsoptimiert konstruiert, somit konnte ein kompakter Roboter eingesetzt werden.
Highlights und Technische Daten
 IP40
IP40 Pneumatisch
Pneumatisch Außengreifen
Außengreifen Innengreifen
Innengreifen- Positionserhalt über Klemmelement
Technische Daten
| Antriebsart | pneumatisch |
| Greifkraft max. | 6600 [N] |
| Greifkonzept | Formschluss |
| Greifsicherung | Klemmung |
| Hub max. | 200 [mm] |
| IP Klasse | IP40 |
| Systemgewicht | 112 [kg] |